Install URSim on your virtual machine
1. What is URSim?
It is called Universal Robots Offline Simulator in a long expression. Near a UR robot arm, you can see a software on the display of the teach pendant. URSim has the exactly same GUI. Because the software’s title is Polyscope, some people exchangeably call URSim with Polyscope.
2. Why do we need virtual machine?
In most cases, we control a UR robot arm from a remote computer. The robot accepts commands from the computer via network communications.
The main reason for installing a URSim (Polyscope) on the virtual machine is to create a similar computer-robot communication enviroment.
3. Installing a virtual machine
I used VirtualBox. You can install with basic (recommended) options.
Once installed, you have two options:
either 1) Installing URSim on Linux
or 2) Installing URSim on Non-Linux.
4. Installing URSim on Linux (on VirtualBox)
4.1. Install Linux (Ubuntu)
You first need to decide the version of Linux and download it. In this example, I downloaded Ubuntu 20.04 LTS. Please refer to other websites introducing steps to install Linux on VirtualBox.
4.2. Download URSim
Next, let’s download URSim software in Linux from the official Universal Robots’ download webpage. Make sure that the Linux has internet connection. In the download website, expand Software section in the list on your left, and tick Linux Offline Simulator. Find the model you want by clicking “LOAD MORE RESULTS”. You need to download a Linux only version. For example, I downloaded “OFFLINE SIMULATOR - CB-SERIES - LINUX - URSIM-3.15.7” (Log in is required).
4.3. Install URSim in Linux
Extract the downloaded file at the location you want to install. Then, locate a folder where install.sh is located. In my case, the file is under $HOME/test/ursim-3.15.7.106331.
Execute:
user@ubuntu:~/test/ursim-3.15.7.106331$ ./install.sh
In most cases, you will see the following error regarding java version.
user@ubuntu:~/test/ursim-3.15.7.106331$ ./install.sh
Checking java version
/usr/bin/java
version 11.0.17
Reading package lists... Done
Building dependency tree
Reading state information... Done
default-jre is already the newest version (2:1.11-72).
0 to upgrade, 0 to newly install, 0 to remove and 31 not to upgrade.
Checking java version
/usr/bin/java
version 11.0.17
Installed java version is too old, exiting
This is mainly because URSim is installable based on Java 1.8 (JDK 8). You need downgrade your java version to 1.8 (source).
4.3.1. Install JDK 8
>> sudo apt-get update
>> sudo apt-get install openjdk-8-jdk -y
4.3.2. Select the JDK 8
>> sudo update-alternatives --config javac
and try to select Java 1.8. Next execute
>> sudo update-alternatives --config java
There are 2 choices for the alternative java (providing /usr/bin/java).
Selection Path Priority Status
------------------------------------------------------------
* 0 /usr/lib/jvm/java-11-openjdk-amd64/bin/java 1111 auto mode
1 /usr/lib/jvm/java-11-openjdk-amd64/bin/java 1111 manual mode
2 /usr/lib/jvm/java-8-openjdk-amd64/jre/bin/java 1081 manual mode
Press <enter> to keep the current choice[*], or type selection number: 2
update-alternatives: using /usr/lib/jvm/java-8-openjdk-amd64/jre/bin/java to provide /usr/bin/java (java) in manual mode
When you execute “./install.sh”, you will see an error regarding libcurl3 package, such as the below:
user@ubuntu:~/test/ursim-3.15.7.106331$ ./install.sh
Checking java version
/usr/bin/java
version 1.8.0_352
java version accepted
Reading package lists... Done
Building dependency tree
Reading state information... Done
Note: selecting 'libjava3d-jni' for glob 'libjava3d-*'
Note: selecting 'libjava3d-java-doc' for glob 'libjava3d-*'
Note: selecting 'libjava3d-java' for glob 'libjava3d-*'
Note: selecting 'ttf-dejavu-core' for glob 'ttf-dejavu*'
Note: selecting 'ttf-dejavu-extra' for glob 'ttf-dejavu*'
Note: selecting 'ttf-dejavu' for glob 'ttf-dejavu*'
Package libcurl3 is not available, but is referred to by another package.
This may mean that the package is missing, has been obsoleted, or
is only available from another source
However the following packages replace it:
libcurl4:i386 libcurl4
E: Package 'libcurl3' has no installation candidate
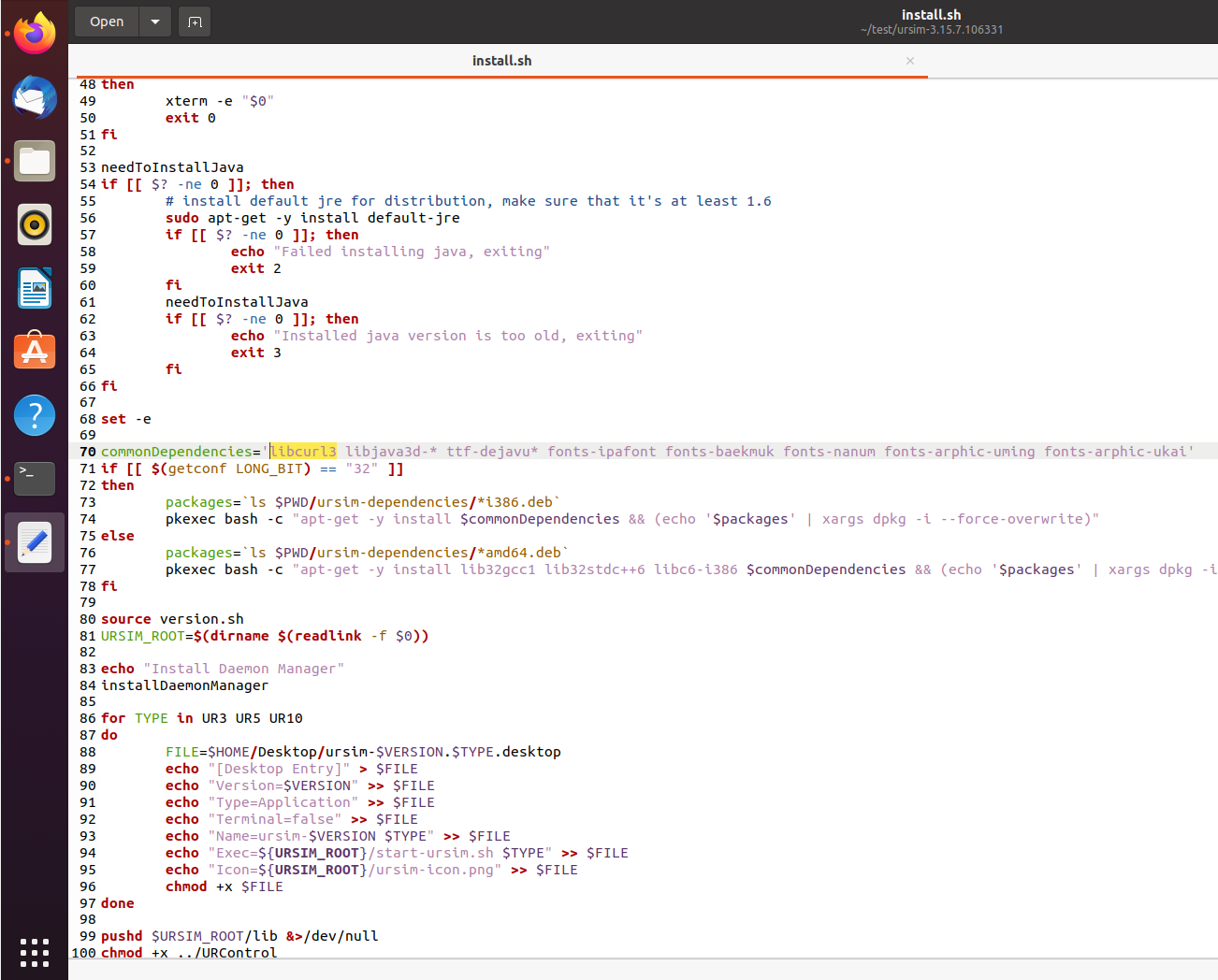
In this case, you need to edit “install.sh” file using an editor. For example,
user@ubuntu:~/test/ursim-3.15.7.106331$ gedit install.sh
and change libcurl3 to libcurl4, located around 70 lines in the file.
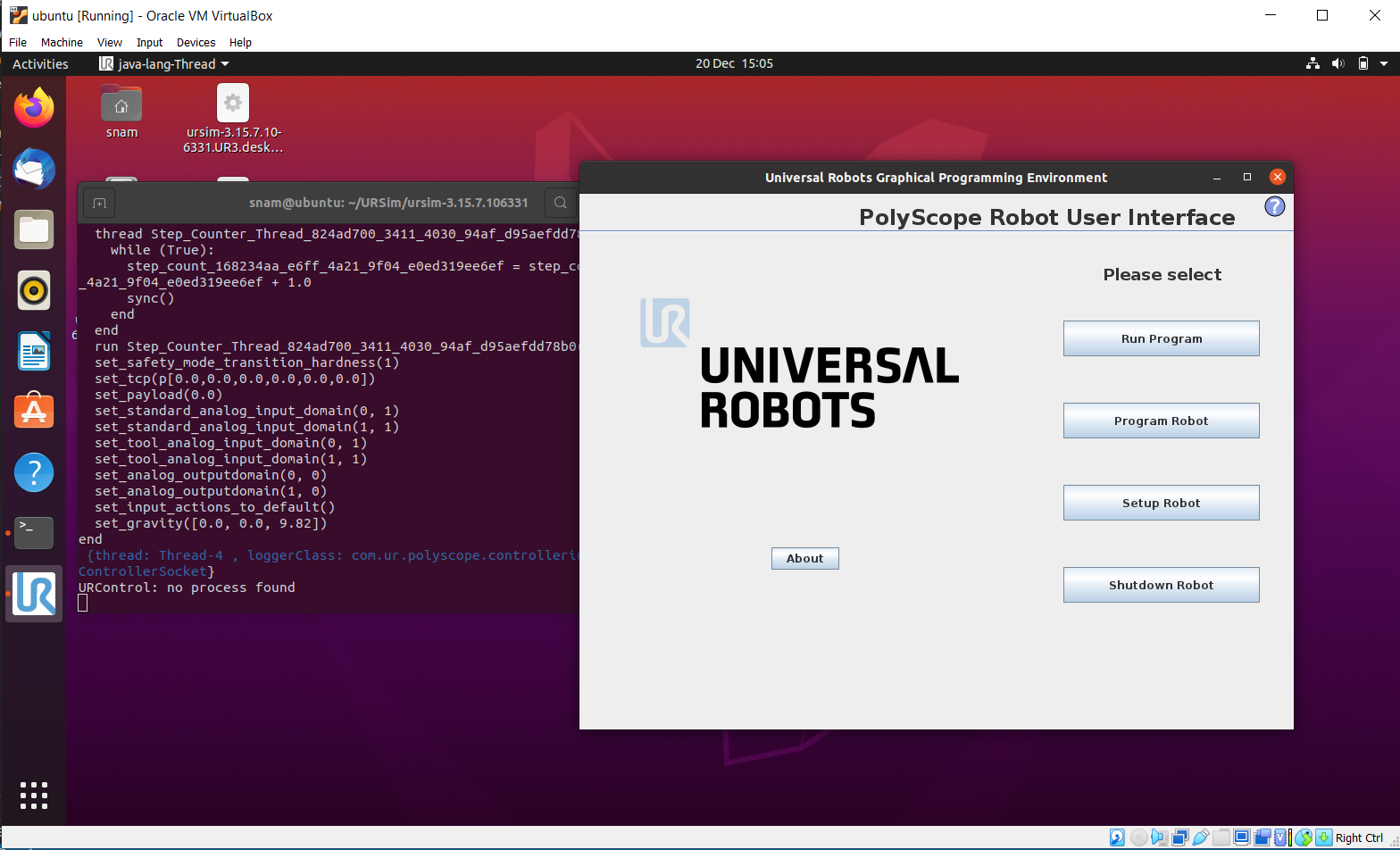
Now, let’s run the application (I want UR10).
user@ubuntu:~/test/ursim-3.15.7.106331$ ./start-ursim.sh UR10
4.4. Controller setup
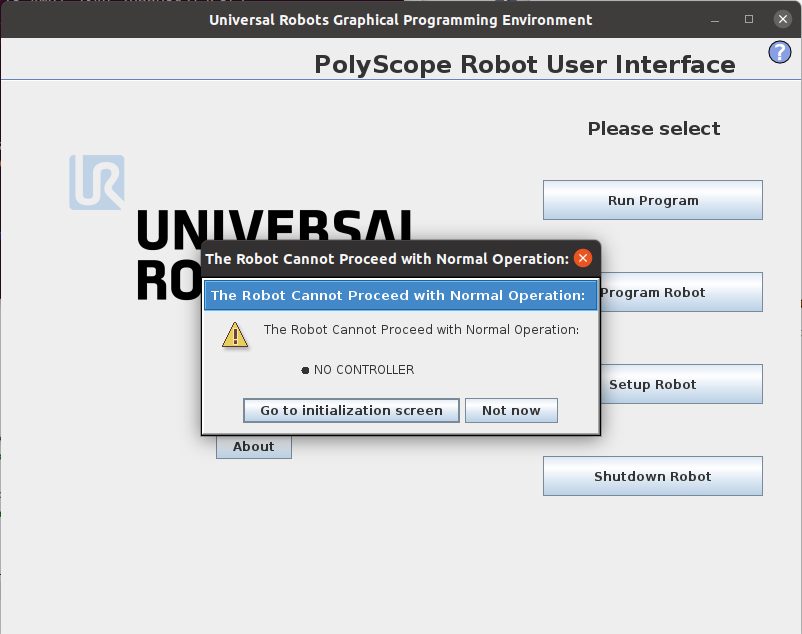
If you see “No Controller” alert, you need to open another terminal without closing the URSim application, go to the installed folder, and execute:
user@ubuntu:~/test/ursim-3.15.7.106331$ sudo ./starturcontrol.sh
4.5. Network setup
This part was the trickiest to me, because no websites in the internet was helpful.
An important conclusion I have learned is that network communication is still possible under an appropriate setup even if the URSim software keeps tell that the network is disabled.

Therefore, it is meaningless to try to enable the network using DHCP or Static address on the URSim software. (Of course, you can do it on the teaching pandent of a real UR robot arm if you have. I am only talking about the network setup on the URSim.)
4.5.1. Network setup on the Virtual Machine
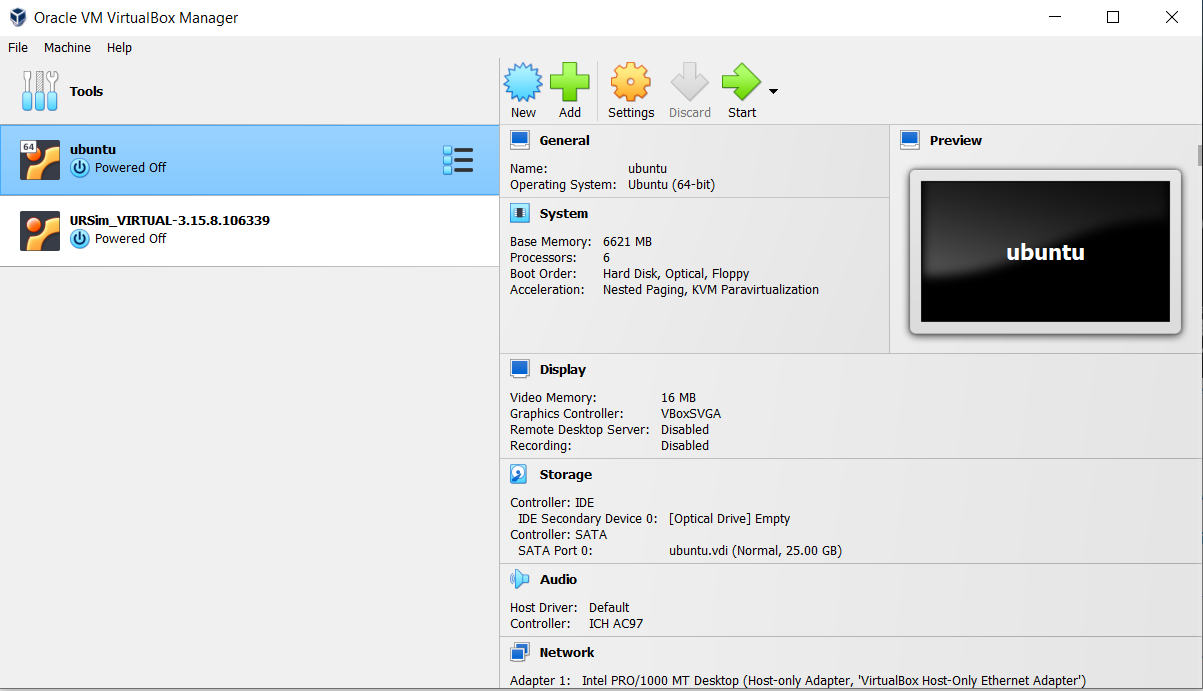
First, turning off the virtual Linux if you are running it. On the list of virtual OS programs, select the virtual Linux, right click, and go to “Settings”. Under the Network, enable “Adapter 1” and “Adapter 2”.
On the “Adapter 1” tab, choose “Host-only Adapter”. I believe this adapter will help you to communicate to the URSim. 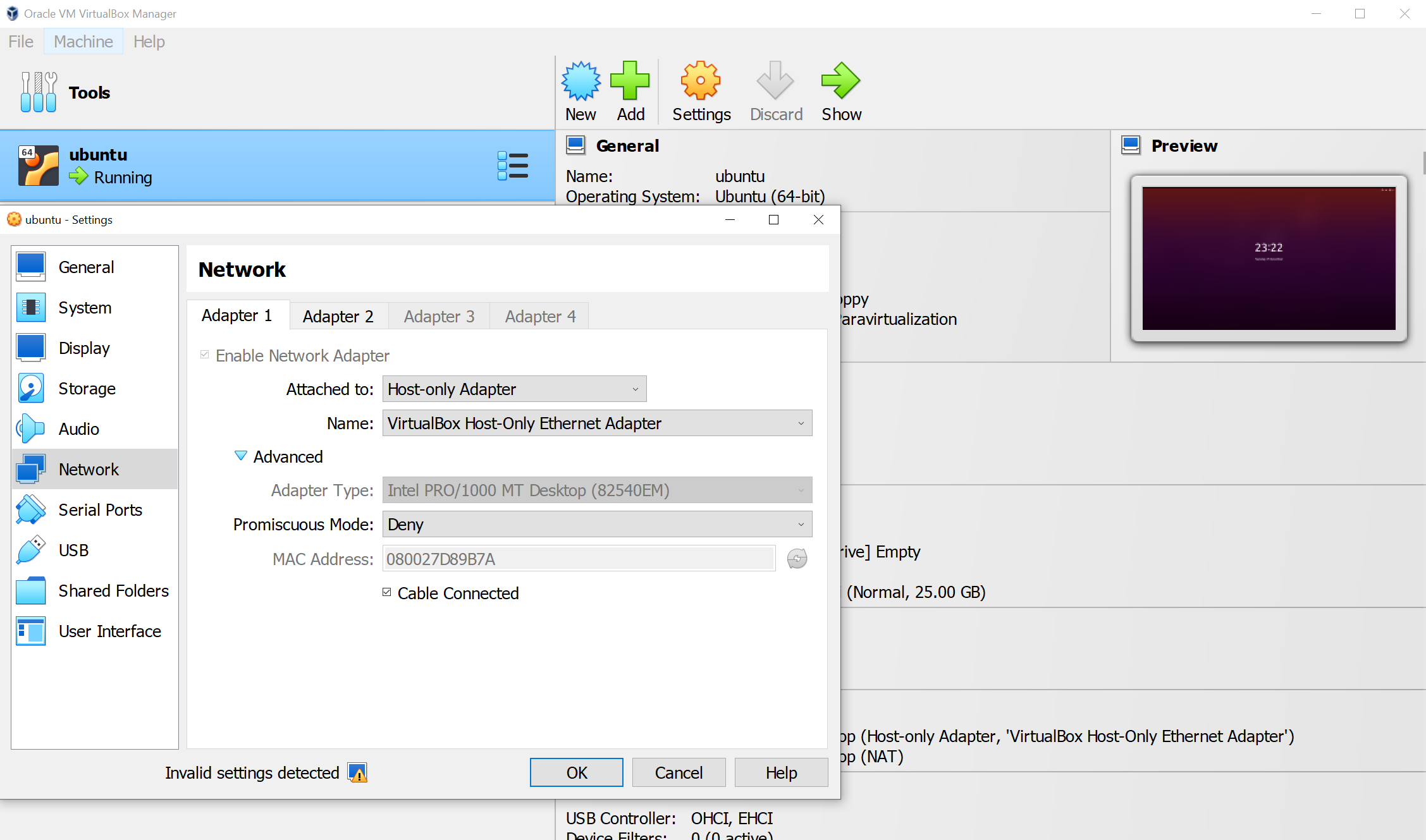
On the “Adapter 2” tab, choose “NAT” without any special settings. By this adapter, you may use internet in the virtual Linux based on the internet connection of your main OS.
Launch the virtual Linux.
4.5.2. Edit Net-statistics file
First, you need to figure out network names. Open Terminal and execute “ifconfig”.
user@ubuntu:~$ ifconfig
enp0s3: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.56.102 netmask 255.255.255.0 broadcast 192.168.56.255
inet6 fe80::a00:27ff:fed8:9b7a prefixlen 64 scopeid 0x20<link>
ether 08:00:27:d8:9b:7a txqueuelen 1000 (Ethernet)
RX packets 1 bytes 590 (590.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 51 bytes 6022 (6.0 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
enp0s8: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 10.0.3.15 netmask 255.255.255.0 broadcast 10.0.3.255
inet6 fe80::a00:27ff:fe47:d23a prefixlen 64 scopeid 0x20<link>
ether 08:00:27:47:d2:3a txqueuelen 1000 (Ethernet)
RX packets 33 bytes 4560 (4.5 KB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 87 bytes 9128 (9.1 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536
inet 127.0.0.1 netmask 255.0.0.0
inet6 ::1 prefixlen 128 scopeid 0x10<host>
loop txqueuelen 1000 (Local Loopback)
RX packets 148 bytes 13700 (13.7 KB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 148 bytes 13700 (13.7 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
I have two networks (enp0s3 and enp0s8) because I set two network adapters in the previous section. You need to remember the network whose ip address is such as 192.168.xxx.xxx. In this case, it should be enp0s3.
Next, go to <the installed URSim folder>/filesys/sbin and open “net-statistics” file with any editor, and please change the interface name as what you have. It is enp0s3 in my case. Save the file.
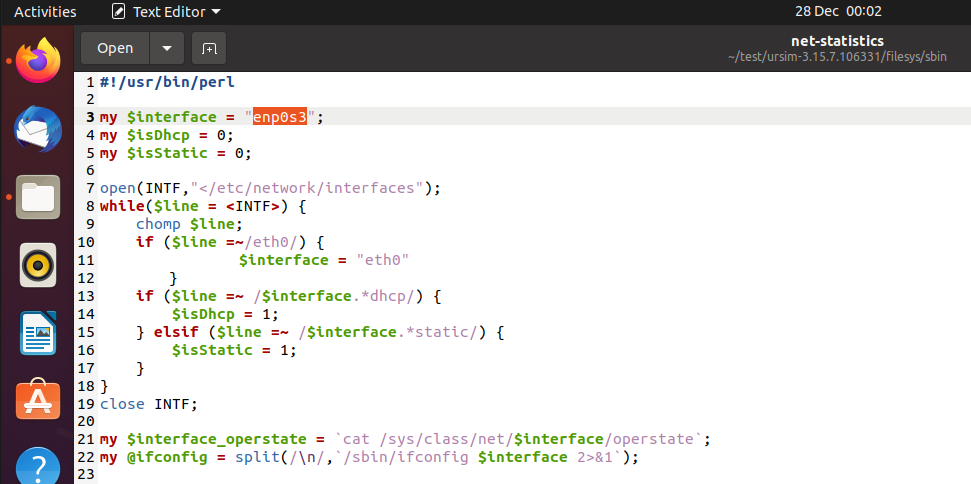
Then, launch the URSim again and click “About” button to see if the ip is set as 192.168.xxx.xxx. If not, you need to open the “net-statistics” file again and change line 50, such as
#foreach $line (@ifconfig) {
# chomp $line;
# if($line =~ /inet addr/) {
# $addr = $line;
# $addr =~ s/.*inet addr:([^ ]*).*/$1/;
# }
# if($line =~ /Mask/) {
# $mask = $line;
# $mask =~ s/.*Mask:([^ ]*).*/$1/;
# }
#}
# Copy and paste the below
foreach $line (@ifconfig) {
chomp $line;
if($line =~ /inet /) {
$addr = $line;
$addr =~ s/.*inet ([^ ]*).*/$1/;
}
if($line =~ /netmask/) {
$mask = $line;
$mask =~ s/.*netmask ([^ ]*).*/$1/;
}
}
Relaunch the URSim and make sure that you can see the ip address by clicking “About” button.
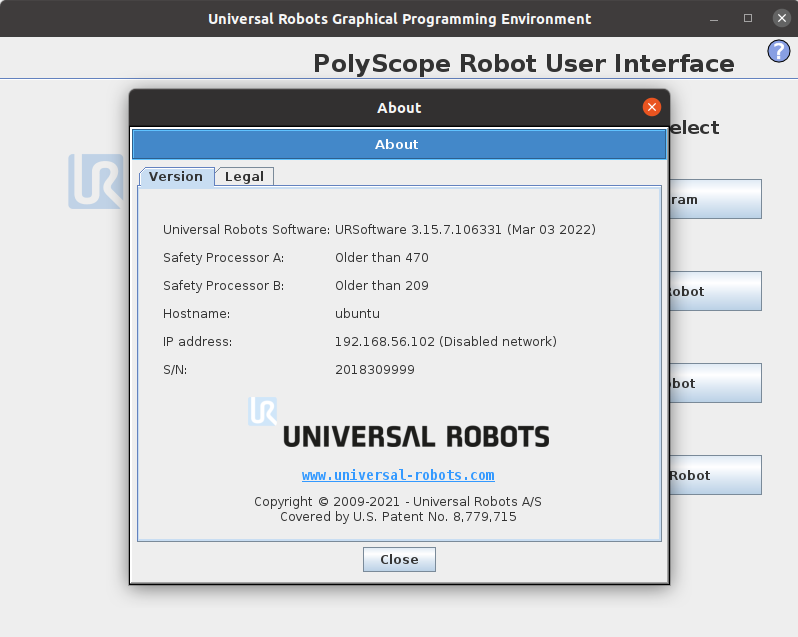
If you can see the ip address, setting up for the network communication is done. Please go to 6. Communication test using IP address
5. Installing URSim on Non-Linux (on VirtualBox)
I basically followed this Youtube link.
6. Communication test using IP address
On your main OS, create a Python file and paste the following codes.
import socket
import time
HOST = "192.168.56.102" # Change this address to your assigned address
PORT = 30002
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.connect((HOST, PORT))
s.send(("set_digital_out(0,True)"+"\n").encode('utf8'))
time.sleep(2)
s.send(("set_digital_out(0,False)"+"\n").encode('utf8'))
s.close()
On your virtual Linux, open the URSim software, click “Program Robot”, click “I/O” tab. As soon as you execute the above Python file, check you can see a light turned on at Digital Output 0.