Install UR10 (CB-series) on ROS Noetic
1. Conditions
- OS: Ubuntu 20.04.5 LTS 64-bit
- Robot: UR10 (CB series)
- Polyscope version: 3.15.8
2. Install ROS Noetic
Please follow the official instructuion.
3. Install Moveit 1 - Noetic
Please remember that all packages (e.g., Moveit) should be downloaded in src folder of your workspace. In addition, I assume that your workspace is set as ~/catkin_ws
First of all, please follow the official instruction until the section called Create A Catkin Workspace and Download MoveIt Source.
You need to remove panda_moveit_config folder in ~/catkin_ws/src, and keep following the section Download Example Code.
4. Install “Universal Robots ROS Driver”
Please follow the official instruction.
I had tried to set up for real-time control by updating the kernel, but no solution was successful so far on the virtual OS. Therefore, I skipped the part.
However, it is important to take step on Extract calibration information section. Once you created “my_robot_calibration.yaml” file, you should follow this page.
After creating example_organization_ur_launch, go to ~/catkin_ws and execute catkin_make. Next, go to ~/catkin_ws/src/Universal_Robots_ROS_Driver/ur_robot_driver/launch and open ur10_bringup.launch file (such as, gedit ur10_bringup.launch).
Finally, modify two places.
<arg name="robot_ip" default="xxx.xxx.xxx.xxx" doc="IP address by which the robot can be reached."/>
Please change “xxx.xxx.xxx.xxx” to the robot’s ip address.
<arg name="kinematics_config" default="$(find example_organization_ur_launch)/etc/ur10_calibration_file.yaml" doc="Kinematics config file used for calibration correction. This will be used to verify the robot's calibration is matching the robot_description."/>
Please change ur10_calibration_file.yaml to your calibration file in ~/catkin_ws/example_organization_ur_launch/etc.
5. Test the UR10 on ROS using a Python code
5.1. Controlling joints in Rviz
source ~/catkin_ws/devel/setup.bash
roslaunch ur_robot_driver ur10_bringup.launch
Go to the teach pandent and “Load Program” -> select “ExternalControl.urp” -> click “Play” button. You should see the following texts in the terminal.
...
[ INFO] [1673022143.409260151]: Robot requested program
[ INFO] [1673022143.409319641]: Sent program to robot
[ INFO] [1673022143.712384573]: Robot connected to reverse interface. Ready to receive control commands.
Open another terminal and execute the following.
rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller
You may need to install rqt_joint_trajectory_controller by running:
sudo apt install ros-<ROS-DISTRO>-rqt-joint-trajectory-controller
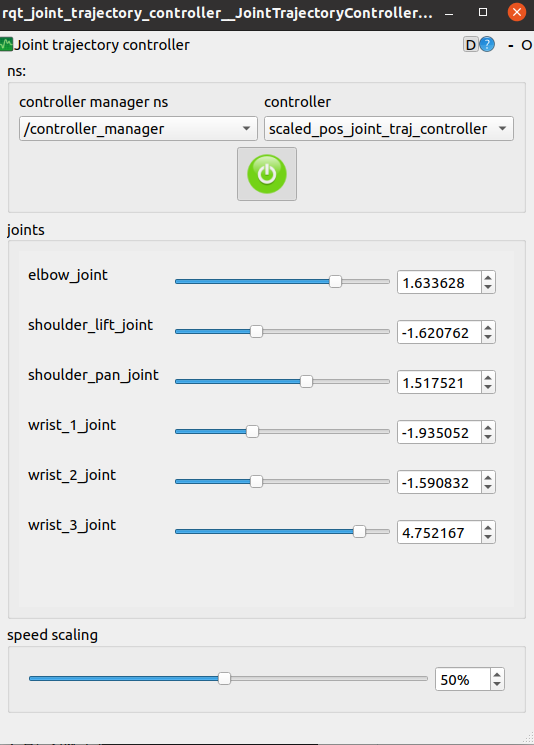
Click the “Turning on” button and see if the UR arm is moving as the joint value changes.
In addition, make a note with the six joint values.
Download this file and save it in ~/catkin_ws/src/Universal_Robots_ROS_Driver/ur_robot_driver/scripts.
Open the Python file and change the position informations. In particular, #20, #71-76, #96-137. I changed the file name to ur10_lightblue_moveit_control.py. Important!! Depending on the value, the UR arm can harm you! Be careful of setting the value.
To test the Python code, execute each line in each terminal:
$ roslaunch ur10_moveit_config moveit_planning_execution.launch
$ roslaunch ur10_moveit_config moveit_rviz.launch rviz_config:=$(rospack find ur10_moveit_config)/launch/moveit.rviz
$ rosrun ur_robot_driver ur10_lightblue_moveit_control.py